ประวัติดาวเทียม
ประวัติ
ตั้งแต่โลกเราได้มีการประดิษฐ์คิดค้นดาวเทียมขึ้นมาใช้งาน ก็ทำให้โลกเกิดสิ่งใหม่ๆ ขึ้นมาอำนวยประโยชน์ให้มนุษย์อย่างมากมาย หลายองค์กรและหลายๆ ประเทศต่างมีการเข้าร่วมกันแลกเปลี่ยนเทคโนโลยี และสร้างสรรค์ผลงานขึ้นมาอำนวยความสะดวกให้แก่มนุษย์ชาติ
ดาวเทียมก่อนทศวรรษที่ 60
ดาวเทียมได้ถูกส่งขึ้นไปโคจรรอบโลกครั้งแรกเมื่อปี
พ.ศ. 2500 ดาวเทียมดังกล่าวมีชื่อว่า "
สปุตนิก (Sputnik)" โดย
รัสเซียเป็นผู้ส่งขึ้นไปโคจร สปุตนิกทำหน้าที่ตรวจสอบการแผ่รังสีของชั้นบรรยากาศชั้น
ไอโอโนสเฟีย ในปี
พ.ศ. 2501 สหรัฐอเมริกาได้ ส่งดาวเทียมขึ้นไปโคจรบ้างมีชื่อว่า "Explorer" ทำให้รัสเซียและสหรัฐเป็น 2 ประเทศผู้นำทางด้านการสำรวจทางอวกาศ และการแข่งขันกันระหว่างทั้งคู่ได้เริ่มขึ้นในเวลาต่อมา
ดาวเทียมในทศวรรษที่ 60
ช่วงทศวรรษนี้เป็นช่วงการเฟื่องฟูของดาวเทียมสำหรับมนุษยชาติ ในเดือนสิงหาคม
ค.ศ. 1960 สหรัฐได้ส่งดาวเทียม Echo 1 ขึ้นไปทำหน้าที่ในการสะท้อนคลื่นวิทยุสู่โลกได้เป็นผลสำเร็จ ทำให้เชื่อได้ว่าการสื่อสารผ่านดาวเทียมเป็นเรื่องที่สามารถเป็นไปได้ซึ่ง ก่อนหน้านั้น ในเดือนเมษายนปีเดียวกัน สหรัฐก็ได้ส่งดาวเทียม TIROS 1 ขึ้นไปสู่อวกาศ ดาวเทียม TIROS 1 เป็นดาวเทียมสำรวจสภาพอากาศดวงแรกที่ได้ส่งภาพถ่ายกลุ่มเมฆหมอกกลับมายังโลก จากนั้นกองทัพเรือสหรัฐได้พัฒนาดาวเทียมหาตำแหน่งดวงแรกที่ได้ถูกส่งขึ้นไป โคจรในเดือนเมษายน ปี ค.ศ. 1960 และหลังจากนั้นเป็นต้นมาก็ได้พัฒนาดาวเทียมเป็นจำนวนมากกว่า 100 ดวงถูกส่งขึ้นไปโคจรแทนที่กันในแต่ละปี
ดาวเทียมในทศวรรษที่ 70
ช่วงทศวรรษที่ 70 ได้มีการเปลี่ยนแปลงใหม่ๆ เกิดขึ้นในโลกของดาวเทียม อุปกรณ์และเครื่องมือใหม่ๆ ที่มีประสิทธิภาพมากกว่าเดิมได้ถูกนำมาใช้ ชิ้นส่วนอุปกรณ์เหล่านั้นล้วนถูกทำขึ้นมาจากการใช้เครื่องคอมพิวเตอร์ และเทคโนโลยีในการผลิตอุปกรณ์อิเล็กทรอนิกส์ตั้งแต่ขั้นตอนการออกแบบและก่อ สร้างดาวเทียม
ดาวเทียมในทศวรรษที่ 80
ช่วงทศวรรษที่ 80 ดาวเทียมได้ถูกนำมาใช้ในการช่วยเหลือมนุษย์มากขึ้น ในเดือนพฤศจิกายน ปี
พ.ศ. 2525 Palapa B-2 ซึ่งเป็นดาวเทียมเพื่อการช่วยเหลือมนุษย์ดวงแรกที่ถูกส่งขึ้นไปโดยบรรทุกไปกับ
กระสวยอวกาศชาเลนเจอร์
ดาวเทียมในทศวรรษที่ 90
ในช่วงทศวรรษที่ 90 ดาวเทียมถูกใช้งานไปอย่างกว้างขวาง ไม่เว้นแม้แต่งานธรรมดาทั่วไป ยกตัวอย่างเช่น บริษัท TRW Inc. ซึ่งเป็นบริษัทเอกชนธรรมดา ก็ได้มีการวางแผนที่จะสร้างระบบดาวเทียมที่ครอบคลุมเครือข่าย ข่ายการสื่อสารผ่านดาวเทียม ระบบนี้เรียกว่า "Odyssey" ซึ่งได้ถูกใช้ในธุรกิจโทรคมนาคม ดาวเทียมของ TRW จะเน้นให้บริการในเขตพื้นที่สำคัญๆ เหมือนกับว่ามันได้ครอบคลุมโลกทุกส่วนไว้เป็นหนึ่งเดียว ฉะนั้น บริษัทจึงคาดหวังว่าจะสร้างกำไรงามๆ จากธุรกิจดาวเทียมโทรคมนาคม เหล่านี้เป็นวิวัฒนาการที่เกิดขึ้นและถูกพัฒนาไปสู่สิ่งที่ดีกว่าอยู่ตลอด เวลา
ดาวเทียมหลังทศวรรษที่ 90
หลังทศวรรษที่ 90 จนถึงศตวรรษที่ 21 ดาวเทียมยังคงถูกพัฒนาประสิทธิภาพ และขีดความสามารถต่อไปอย่างไม่หยุดยั้ง จนก้าวไปสู่ระบบอุตสาหกรรมดาวเทียม
ส่วนประกอบดาวเทียม
ดาวเทียมเป็นเครื่องมือทาง
อิเล็กทรอนิกส์ที่ซับซ้อน มีส่วนประกอบหลายๆ อย่างประกอบเข้าด้วยกันและสามารถทำงานได้โดยอัตโนมัติ สามารถโคจรรอบโลกด้วยความเร็วที่สูงพอที่จะหนีจาก
แรงดึงดูดของโลกได้ การสร้างดาวเทียมนั้นมีความพยายามออกแบบให้ชิ้นส่วนต่างๆ ทำงานได้อย่างประสิทธิภาพมากที่สุด และราคาไม่แพงมาก ดาวเทียมประกอบด้วยส่วนประกอบเป็นจำนวนมาก แต่ละส่วนจะมีระบบควบคุมการทำงานแยกย่อยกันไป และมีอุปกรณ์เพื่อควบคุมให้ระบบต่างๆ ทำงานร่วมกัน โดยองค์ประกอบส่วนใหญ่ของดาวเทียมประกอบด้วยส่วนต่างๆ ดังนี้
- โครงสร้างดาวเทียม เป็นส่วนประกอบที่สำคัญมาก โครงจะมีน้ำหนักประมาณ 15 - 25% ของน้ำหนักรวม ดังนั้น จึงจำเป็นต้องเลือกวัสดุที่มีน้ำหนักเบา และต้องไม่เกิดการสั่นมากเกินที่กำหนด หากได้รับสัญญาณที่มีความถี่ หรือความสูงของคลื่นมากๆ (amptitude)
- ระบบเครื่องยนต์ ซึ่งเรียกว่า "aerospike" อาศัยหลักการทำงานคล้ายกับเครื่องอัดอากาศ และปล่อยออกทางปลายท่อ ซึ่งระบบดังกล่าวจะทำงานได้ดีในสภาพสุญญากาศ ซึ่งต้องพิจารณาถึงน้ำหนักบรรทุกของดาวเทียมด้วย
- ระบบพลังงาน ทำหน้าที่ผลิตพลังงาน และกักเก็บไว้เพื่อแจกจ่ายไปยังระบบไฟฟ้าของดาวเทียม โดยมีแผงรับพลังงานแสงอาทิตย์ (Solar Cell) ไว้รับพลังงานจากแสงอาทิตย์เพื่อเปลี่ยนเป็นพลังงานไฟฟ้า ให้ดาวเทียม แต่ในบางกรณีอาจใช้พลังงานนิวเคลียร์แทน
- ระบบควบคุมและบังคับ ประกอบด้วย คอมพิวเตอร์ที่เก็บรวมรวมข้อมูล และประมวลผลคำสั่งต่างๆ ที่ได้รับจากส่วนควบคุมบนโลก โดยมีอุปกรณ์รับส่งสัญญาณ (Radar System) เพื่อใช้ในการติดต่อสื่อสาร
- ระบบสื่อสารและนำทาง มีอุปกรณ์ตรวจจับความร้อน ซึ่งจะทำงาน โดยแผงวงจรควบคุมอัตโนมัติ
- อุปกรณ์ควบคุมระดับความสูง เพื่อรักษาระดับความสูงให้สัมพันธ์กันระหว่างพื้นโลก และดวงอาทิตย์ หรือเพื่อรักษาระดับให้ดาวเทียมสามารถโคจรอยู่ได้
- เครื่องมือบอกตำแหน่ง เพื่อกำหนดการเคลื่อนที่ นอกจากนี้ยังมีส่วนย่อยๆ อีกบางส่วนที่จะทำงานหลังจาก ได้รับการกระตุ้นบางอย่าง เช่น ทำงานเมื่อได้รับสัญญาณ สะท้อนจากวัตถุบางชนิด หรือทำงานเมื่อได้รับลำแสงรังสี ฯลฯ
ชิ้นส่วนต่างๆ ของดาวเทียมได้ถูกทดสอบอย่างละเอียด ส่วนประกอบต่างๆ ถูกออกแบบสร้าง และทดสอบใช้งานอย่างอิสระ ส่วนต่างๆ ได้ถูกนำมาประกอบเข้าด้วยกัน และทดสอบอย่างละเอียดครั้งภายใต้สภาวะที่เสมือนอยู่ในอวกาศก่อนที่มัน จะถูกปล่อยขึ้นไปใน
วงโคจร ดาวเทียมจำนวนไม่น้อยที่ต้องนำมาปรับปรุงอีกเล็กน้อย ก่อนที่พวกมันจะสามารถทำงานได้ เพราะว่าหากปล่อยดาวเทียมขึ้นสู่วงโคจรแล้ว เราจะไม่สามารถปรับปรุงอะไรได้ และดาวเทียมต้องทำงานอีกเป็นระยะเวลานาน ดาวเทียมส่วนมากจะถูกนำขึ้นไปพร้อมกันกับจรวด ซึ่งตัวจรวดจะตกลงสู่มหาสมุทรหลังจากที่เชื้อเพลิงหมด
วงโคจรของดาวเทียม
วงโคจรดาวเทียม (Satellite Orbit) เมื่อแบ่งตามระยะความสูง (Altitude) จากพื้นโลกแบ่งเป็น 3 ระยะคือ
วงโคจรต่ำของโลก
วงโคจรต่ำของโลก (Low Earth Orbit "LEO") คือระยะสูงจากพื้นโลกไม่เกิน 1,000 กม. ใช้ในการสังเกตการณ์ สำรวจสภาวะแวดล้อม, ถ่ายภาพ ไม่สามารถใช้งานครอบคลุมบริเวณใดบริเวณหนึ่งได้ตลอดเวลา เพราะมีความเร็วในการเคลื่อนที่สูง แต่จะสามารถบันทึกภาพคลุมพื้นที่ตามเส้นทางวงโคจรที่ผ่านไป ตามที่สถานีภาคพื้นดินจะกำหนดเส้นทางโคจรอยู่ในแนวขั้วโลก (Polar Orbit) ดาวเทียมวงโคจรระยะต่ำขนาดใหญ่บางดวงสามารถมองเห็นได้ด้วยตาเปล่าในเวลาค่ำ หรือก่อนสว่าง เพราะดาวเทียมจะสว่างเป็นจุดเล็ก ๆ เคลื่อนที่ผ่านในแนวนอนอย่างรวดเร็ว
วงโคจรระยะปานกลาง (Medium Earth Orbit "MEO")
อยู่ที่ระยะความสูงตั้งแต่ 1,000 กม. ขึ้นไป ส่วนใหญ่ใช้ในด้าน
อุตุนิยมวิทยา และสามารถใช้ในการติดต่อสื่อสารเฉพาะพื้นที่ได้ แต่หากจะติดต่อให้ครอบคลุมทั่วโลกจะต้องใช้ดาวเทียมหลายดวงในการส่งผ่าน
วงโคจรประจำที่ (Geostationary Earth Orbit "GEO")
เป็นดาวเทียมเพื่อการสื่อสารเป็นส่วนใหญ่ อยู่สูงจากพื้นโลกประมาณ 35,780 กม. เส้นทางโคจรอยู่ในแนว
เส้นศูนย์สูตร (Equatorial Orbit) ดาวเทียมจะหมุนรอบโลกด้วยความเร็วเชิงมุมเท่ากับโลกหมุนรอบตัวเองทำให้ดู เหมือนลอยนิ่งอยู่เหนือ จุดจุดหนึ่งบนโลกตลอดเวลา (เรียกทั่ว ๆ ไปว่า "ดาวเทียมค้างฟ้า")
ดาวเทียมจะอยู่กับที่เมื่อเทียบกับโลกมีวงโคจรอยู่ในระนาบเดียวกันกับ เส้นศูนย์สูตร อยู่สูงจากพื้นโลกประมาณ 35,786 กม. วงโคจรพิเศษนี้เรียกว่า “วงโคจรค้างฟ้า” หรือ “
วงโคจรคลาร์ก” (Clarke Belt) เพื่อเป็นเกียรติแก่นาย
อาร์เทอร์ ซี. คลาร์ก ผู้นำเสนอแนวคิดเกี่ยวกับวงโคจรนี้ เมื่อ เดือนตุลาคม
ค.ศ. 1945
วงโคจรคลาร์ก เป็นวงโคจรในระนาบเส้นศูนย์สูตร (EQUATOR) ที่มีความสูงเป็นระยะที่ทำให้ดาวเทียมที่เคลื่อนที่ด้วย
ความเร็วเชิงมุมเท่า กันกับการหมุนของโลก แล้วทำให้เกิดแรงเหวี่ยงหนีศูนย์กลางมีค่าพอดีกับค่าแรงดึงดูดของโลกพอดี เป็นผลให้ดาวเทียมดูเหมือนคงอยู่กับที่ ณ ระดับความสูงนี้ ดาวเทียมค้างฟ้าส่วนใหญ่ใช้ในการสื่อสารระหว่างประเทศและภายในประเทศ เช่น ดาวเทียมอนุกรม อินเทลแซต ๆลๆ
ประเภทของดาวเทียม
- ดาวเทียมสื่อสาร
- ดาวเทียมสำรวจ
- ดาวเทียมพยากรณ์อากาศ
- ดาวเทียมทางการทหาร
- ดาวเทียมด้านวิทยาศาสตร์
รายชื่อดาวเทียมตามการใช้งาน
- ดาวเทียมที่ใช้ในการสื่อสารแบบจุดต่อจุด เช่น PALAPA THAICOM
- ดาวเทียมสื่อสารระหว่างดาวเทียม เช่น TDRS
- ดาวเทียมเพื่อการสื่อสารเคลื่อนที่บนบก ในน้ำ และในอากาศ เช่น INMASAT
- ดาวเทียมเพื่อการสื่อสารวิทยุกระจายเสียง และวิทยุโทรศัพท์ เช่น ASTRA
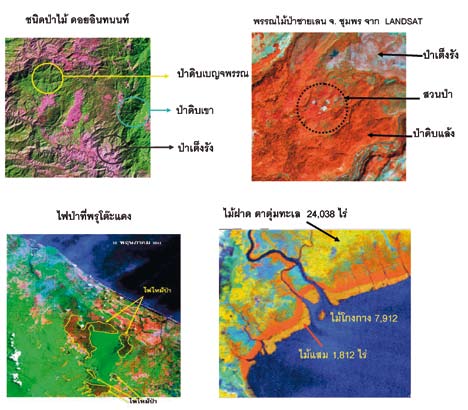
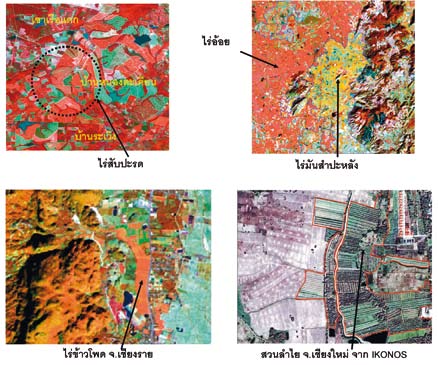
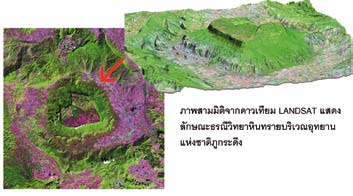
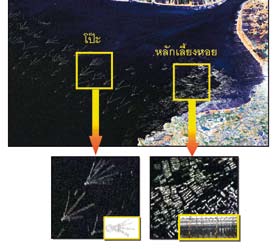
- ดาวเทียมเพื่อการสำรวจโลก สำรวจทรัพย์ยากรธรรมชาติ เช่น LANDSAT
- ดาวเทียมเพื่อการสำรวจอวกาศ เช่น METEOR EXPLORER
- ดาวเทียมเพื่อการพยากรณ์อากาศ เช่น GMS NOAA 6-9
- ดาวเทียมเพื่อการปฏิบัติในห้วงอวกาศ เช่น SPAS SKYLAB
- ดาวเทียมเพื่อกิจการวิทยุสมัครเล่น เช่น JAS-1 JAS-2 AO-40
- ดาวเทียมเพื่อการกำหนดตำแหน่ง เช่น NAVSTAR
- ดาวเทียมเพื่อการนำร่องเรือ และ อากาศยาน เช่น TRANSIT COSMOS





























{kind=link}